Boundary Crossing: Runtime Governance for Coalition UAV ISR
Policy Cards in action: coalition UAVs crossing jurisdictional boundaries.

TL;DR → Policy Cards provide machine-readable rules evaluated at decision time, enable ROE updates in seconds, support safe multi-policy interaction, and generate full audit logs, preventing silent violations while preserving shared situational awareness.
— Based on our Policy Cards framework.
14:37 UTC – Contested Coastal Zone
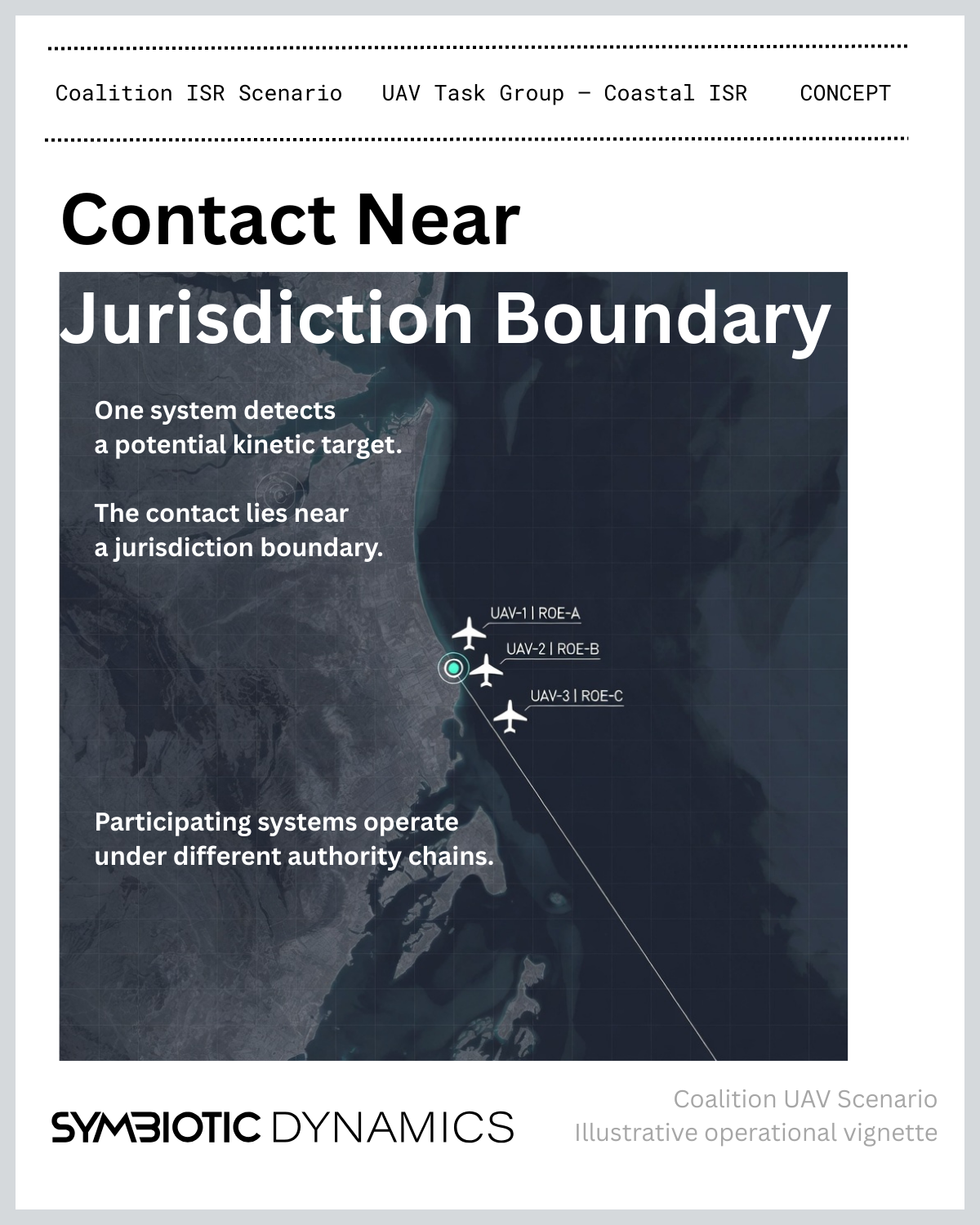
A coalition UAV task group is conducting live ISR over a contested coastline. Three autonomous platforms (UAV-1 under ROE-A, UAV-2 under ROE-B, UAV-3 under ROE-C) maintain shared situational awareness while operating under distinct national rules of engagement and authority chains.
One platform detects a potential kinetic target lying near a jurisdiction boundary. The mission context has just shifted. A new ROE update arrived 47 seconds ago.
Under these conditions, is autonomous kinetic action still permitted?
The Policy Card intervenes at decision time.
It suppresses the autonomous strike, locks the weapon system on the affected platform, and triggers an immediate machine-readable escalation to the mission commander. The other two platforms continue within their own constraints. No silent violation occurs.
Policy Card enforcement at runtime
- Jurisdiction-specific rules of engagement (ROE-A, ROE-B, ROE-C) are bound directly to each platform and evaluated locally at decision time. Authority boundaries remain unambiguous even when data is shared across the coalition.
- Autonomous kinetic actions are explicitly allowed, denied, or escalated based on real-time mission context and the active policy version.
- Rapid policy exchange is built-in: the new ROE update was pushed as a signed, versioned Policy Card only 47 seconds earlier. No code change, no redeployment, no downtime.
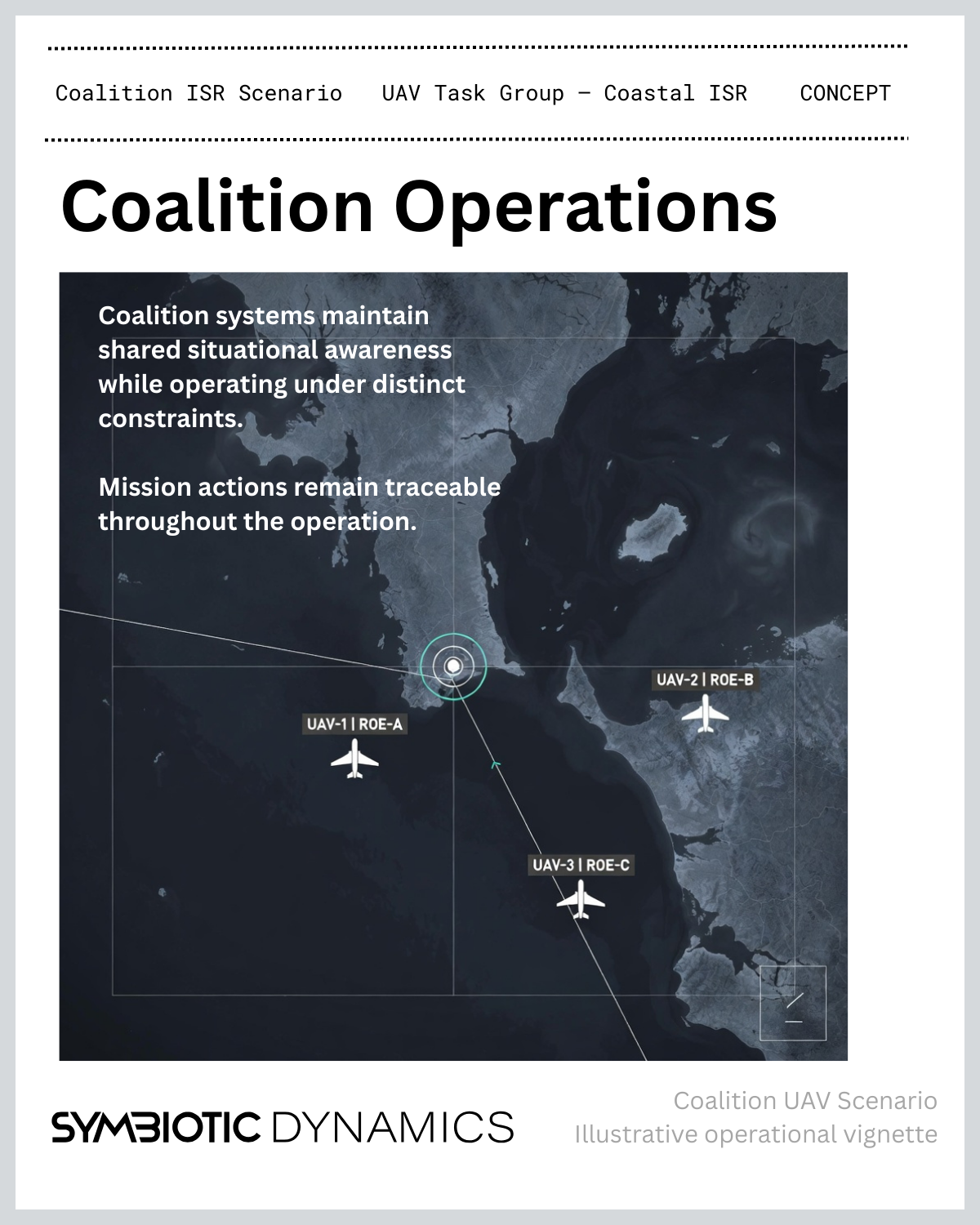
- Different Policy Cards interact safely: each platform enforces its own national constraints while the coalition maintains shared situational awareness and full traceability of every mission action.
- All evidence, confidence scores, constraint evaluations, and escalation events are logged automatically for live assurance and post-mission audit.
This is executable governance that travels with every autonomous platform.
Why this matters for UK Defence
The Strategic Defence Review calls for “wartime pace” innovation, a Defence Uncrewed Systems Centre, and deeper AI integration across intelligence and targeting. Autonomous systems cannot scale safely, or interoperate across coalitions, without a machine-readable layer that tells them the rules at decision time.
Policy Cards (detailed in our arXiv paper: https://arxiv.org/abs/2510.24383) deliver exactly that: runtime constraints, explicit escalation, continuous compliance, and auditable outputs. They are open-source, vendor-agnostic, and designed from the ground up for agentic and multi-agent systems, including encrypted policy attestation for future distributed operations.
Autonomous defence systems do not work without runtime governance.
Do you want to see this on your system?
We run a focused 90-minute Discovery Workshop where we take one real autonomous workflow, e.g., coalition ISR, and build the first Policy Card together. You will see how governance and engineering teams collaborate on concrete allow/deny/escalate rules.
If you’re building or deploying autonomous systems in defence, reach out. Let’s turn policy and safety into code that your agents can actually follow.